Independent Project, Supervised by Prof. Haihong Chi
Features:
Proposed a distributed control scheme for multi-agent systems inspired by the physics of liquid foams
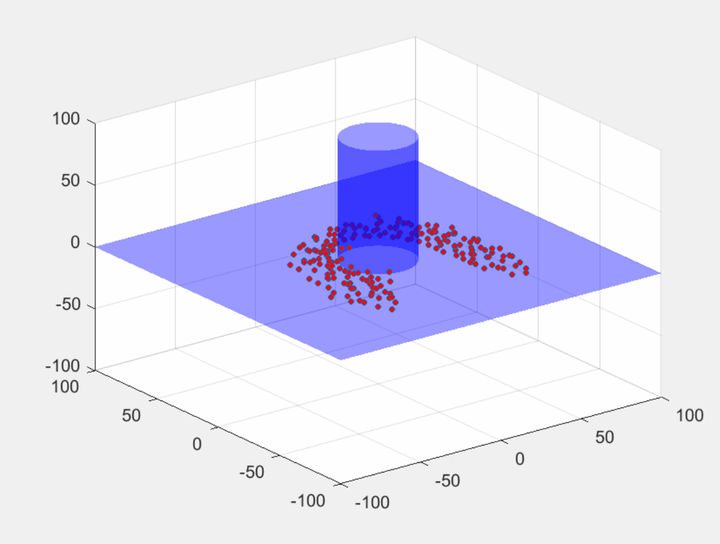
Implemented a convincing simulation of 3D flocking behaviour with obstacle avoidance in MATLAB based on an ODE system derived from the dynamic behavior of the foam
Greatly enhanced the computing efficiency by introducing graph data structure and optimizing the algorithm to a vectorized version, enabling for simulation of massive multi-agent systems